jetson nano 구입후 전원은 들어가지만 모니터 연결해도 아무것도 안나오고 벽돌이 된것처럼 동작 안할때가 있다
그럴때 하거나, 모니터 연결없이 바로 세팅하고 싶을때 쓰는 방법이다
1. ubuntu 18.04가 설치된 pc 필요
- 가상환경 X
2. nvidia sdk manager install
- https://developer.nvidia.com/drive/sdk-manager
SDK Manager
An end-to-end development environment setup solution for DRIVE, Jetson, and more. SDKs.
developer.nvidia.com
실행

- 이 단계에서는 jetson nano 를 연결하지 않아도됨
- target hardware를 jetson nano modules로 선택
- continue

- 하단 에 동의하는 부분 check후 continue
- 필요한 파일들을 download하기 시작함
- 완료후 jetson nano를 연결하라는 msg가 나옴
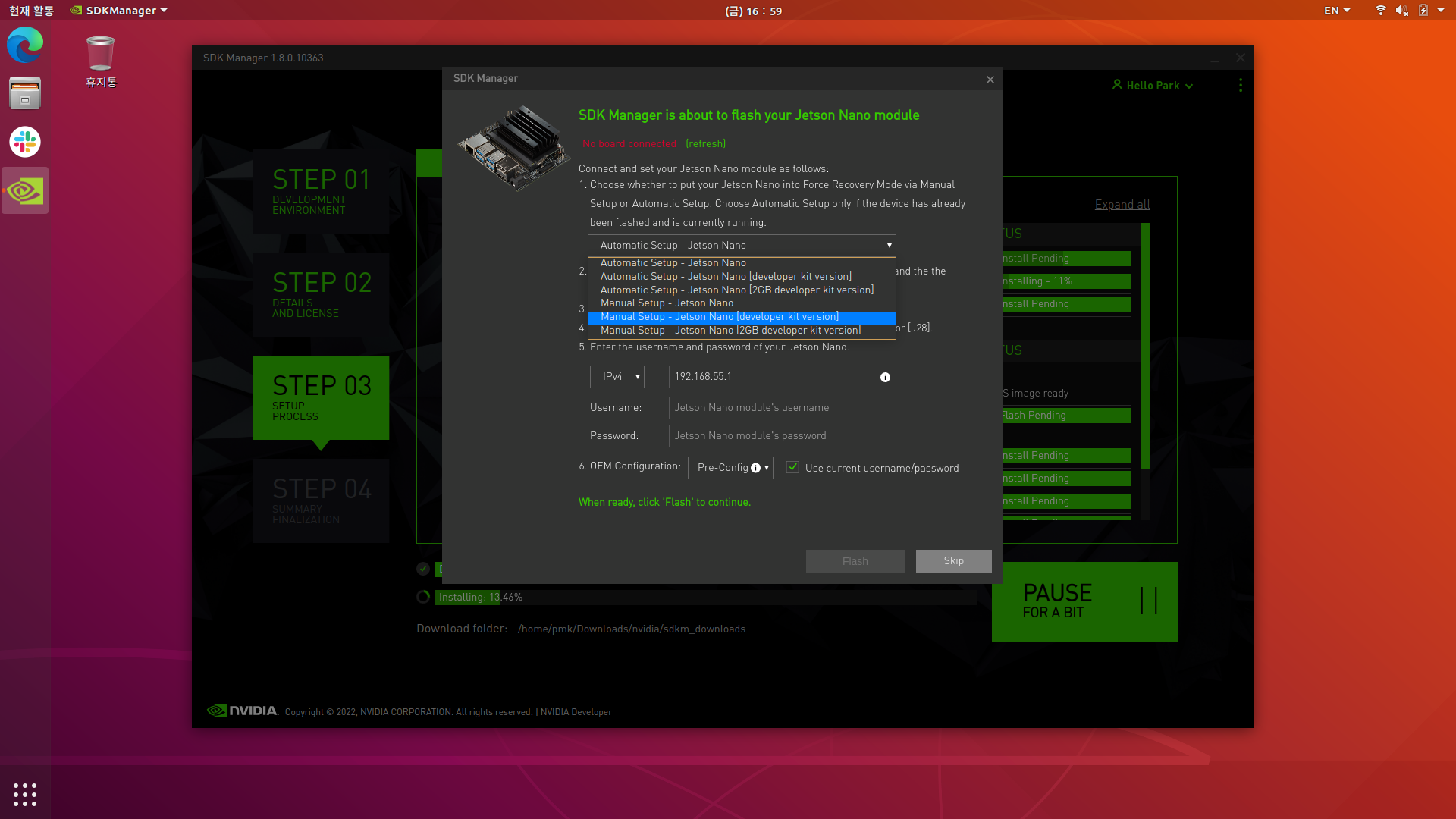
- jetson nano 종류와 setup 방법 선택
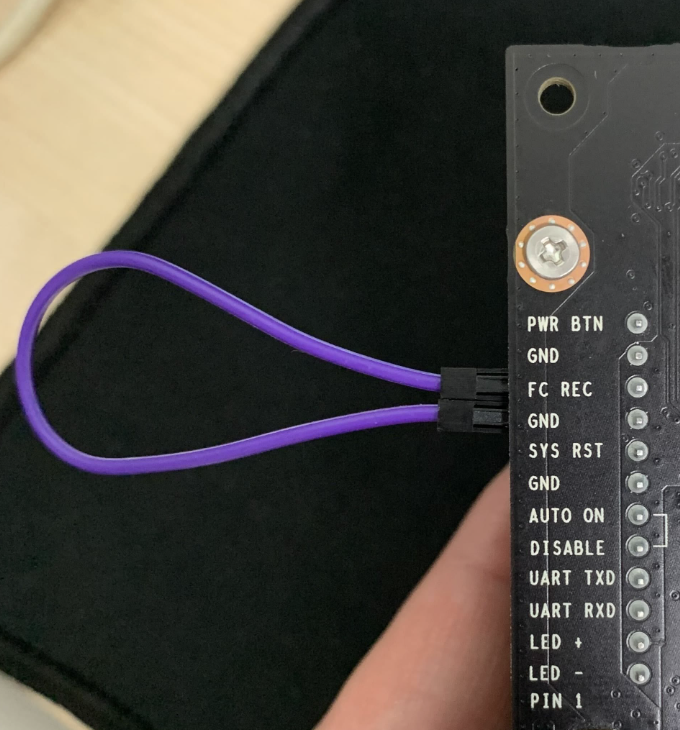
- debug port에 위와같이 점퍼로 연결
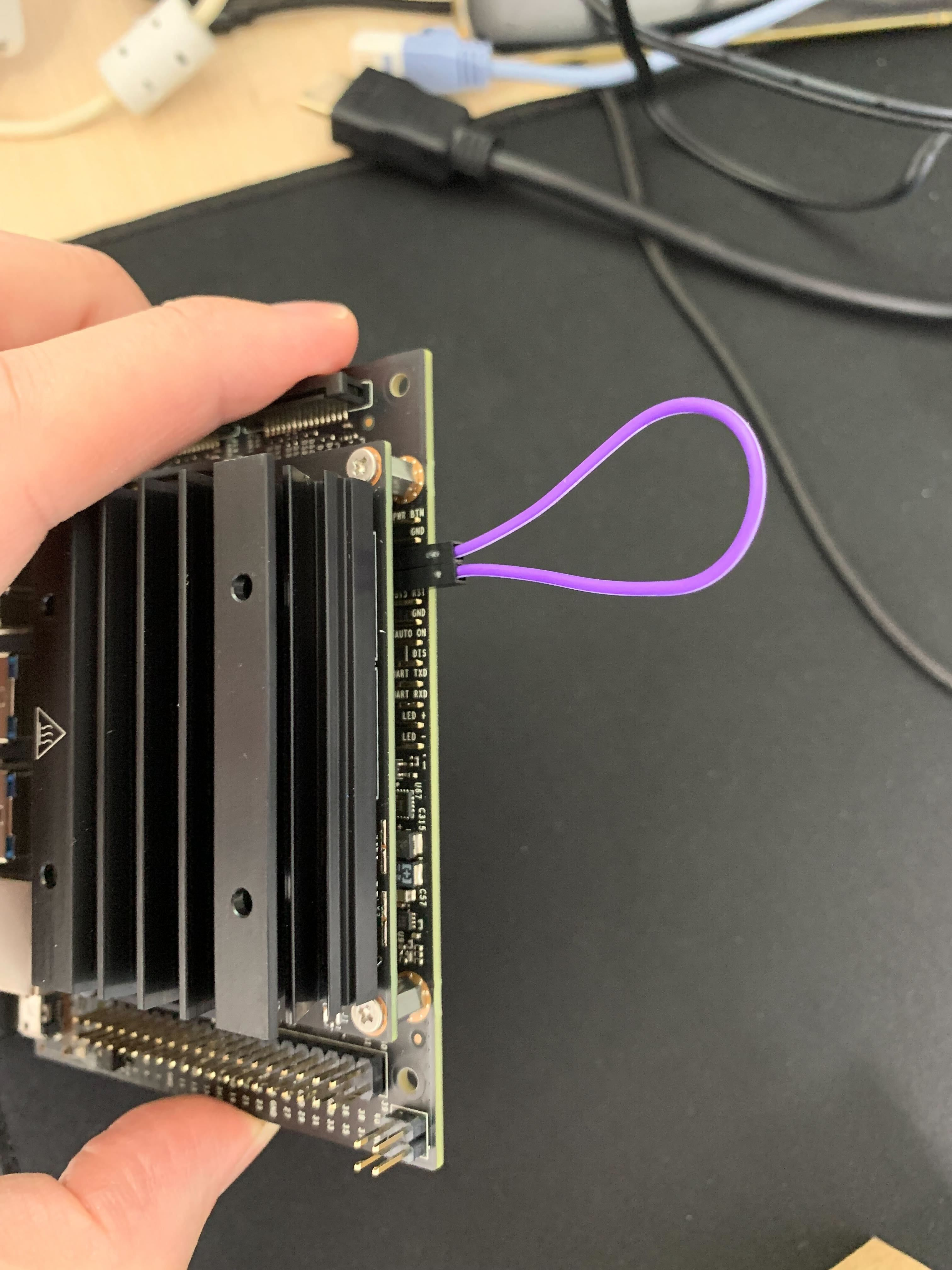
- sd card 장착 후 PC와 usb 연결후 전원 연결 (sd card 쓰지 않는 jetson nano 의 경우 바로 전원 연결)
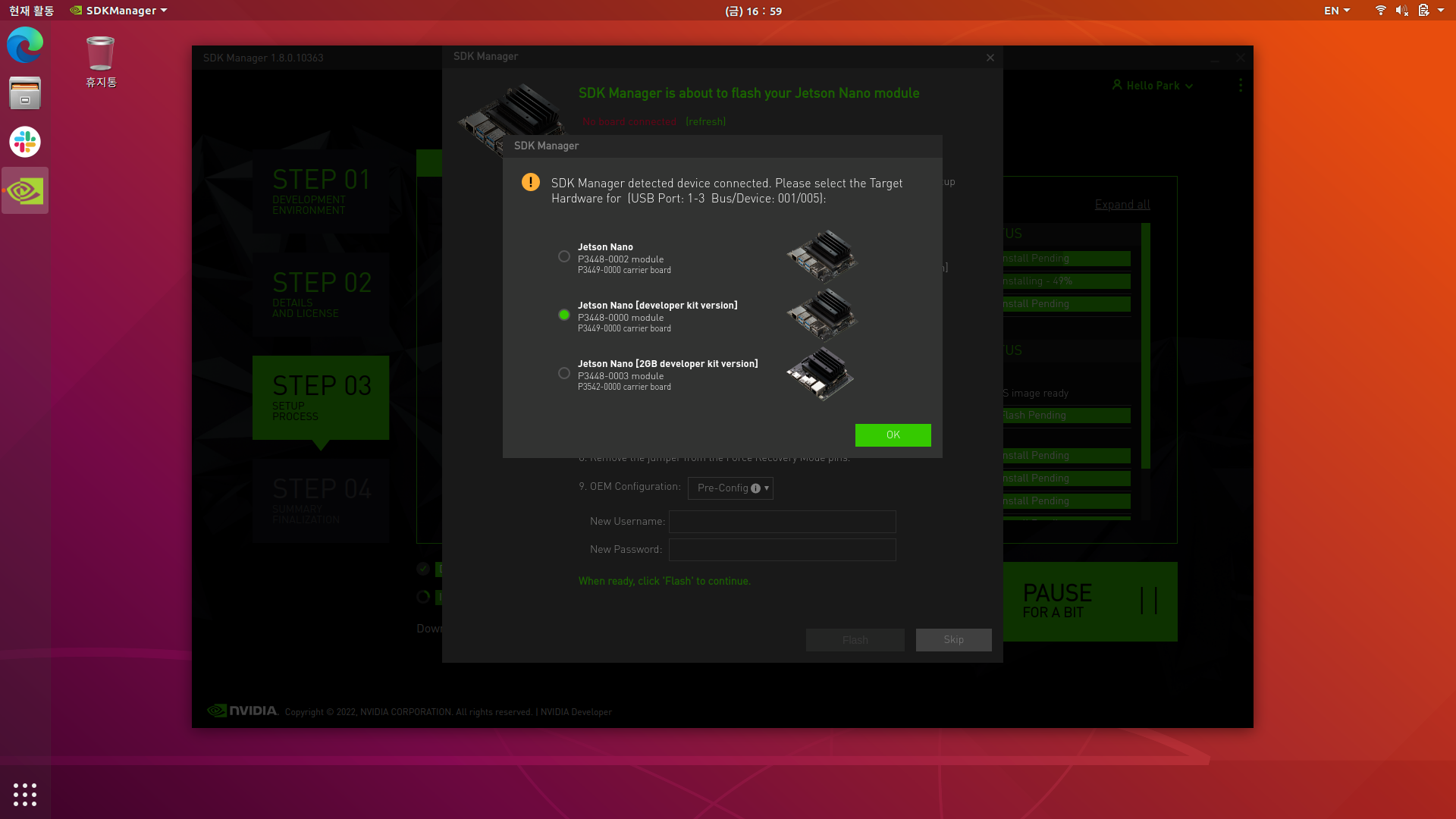
- 연결을 감지하면 위 화면이 나옴
- 맞는 것을 선택후 점퍼 연결 해제
- setting 화면에서 필요한 부분을 적절하게 선택후 finish (7번 username, pw 설정하면 편리함)
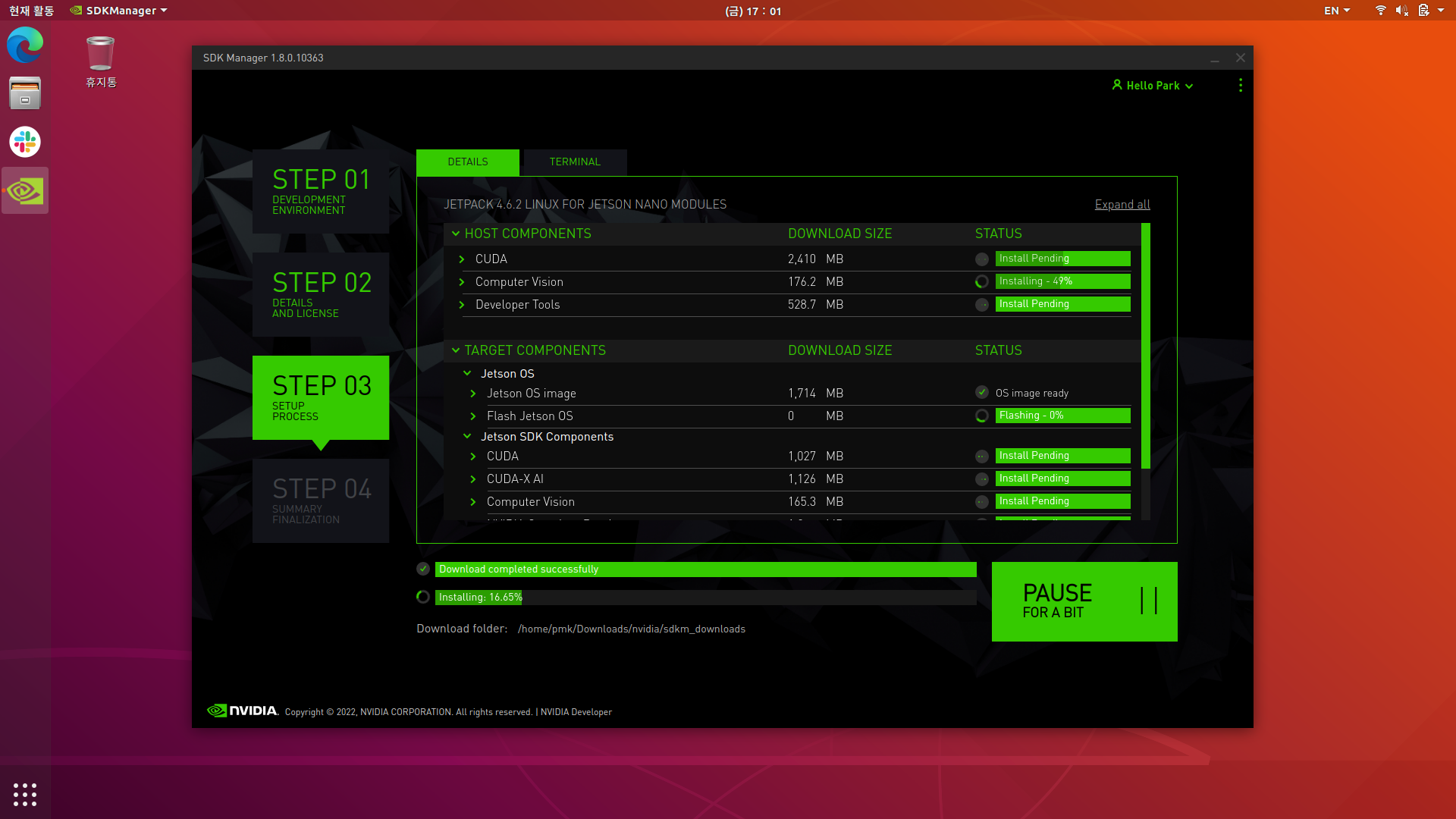
- 기본 img가 올라가면 추가 파일 설치를 진행해야함
- username, pw 는 아까 입력해둔걸로 하면 나머지 추가 파일들도 알아서 잘 설치됨
'Study(~ing) > Etc' 카테고리의 다른 글
| merge (0) | 2020.09.07 |
|---|










